热门关键词: 石墨制品 | 纯矽制品 | 特殊金属 | 金属制品 | 陶瓷制品 | 石英制品 | 二手设备
专业的半导体机台服务应用公司
范围:Lam 9400、9600、4520、2300——
AMAT P500, DPS, centura, endura——
全国服务热线 0519-68910861


 启闳半导体科技(江苏)有限公司
启闳半导体科技(江苏)有限公司机械手是集成电路设备中的重要部件之一,它具有高洁净度、高平稳性、高精度、高效率和高可靠性的特点,主要用于生产线和设备中的片盒( Cassette或FOUP)传输,以及设备内部不同模块之间的圆片传输。
机械手通常由控制器、驱动器、手臂及末端执行器( End Effector) 等部分组成。根据运动轴数量的不同,分为单轴或多轴机械手。一般来讲, 轴数越多,机械手实现复杂运动的能力就越大。
集成电路行业中的机械手应用十分广泛,种类繁多。国外知名的半导体应用机械手供应商很多,如美国的Brooks,日本的安川电机(YASKAWA)、川崎( KAWASAKI)、JEL、RORZE、SANKYO等,韩国的Robostar、RND等。
国内厂家起步较晚,其中沈阳新松的机械手产品已开始进入国内市场。机械手依据功能和应用场合的不同,价格差异很大。圆片传送机械手单台售价一般为2万美元-5万美元,片盒传送机械手单台售价最高则有可能接近10万美元;表8-58列出了集成电路制造领域的机械手类型。
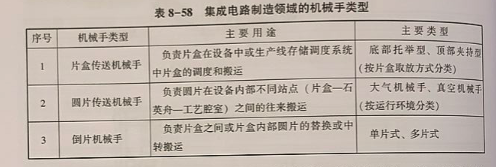
片盒传送机械手主要用于集成电路生产线上物料中转存储舱中的片盒调度搬运,以及部分设备内部的片盒搬运。依据应用系统的不同要求,在结构形分和功能要求上都有所区别。
圆片传送机械手主要用于设备内部不同模块间的圆片传送,按工作环境的适应性,可以分为大气机械手和真空机械手两类。由于集成电路制造的洁净度要求很高,很多环节的工作都必须依靠机械手来自动完成。在取放圆片的环节中,圆片自动取放系统依据预先设定的程序来控制机械手完成圆片在指定片盒及指定位置中的取放。
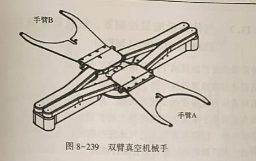
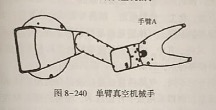
(1)真空机械手:用于集成电路加工过程中真空环境下不同工位或不同工艺腔室之间的圆片传送。其功能主要通过真空(超净)环境下的大间隙直驱电动机的选用、多运动轴的同轴直接驱动与真空隔离、高真空与高洁净环境下的精密伺服控制等手段来实现,具有密封性好、颗粒污染小、传输效率高等特点。按手臂数量的不同,真空机械手可分为双臂和单臂两种类型,如图8-239和图8-240所示。
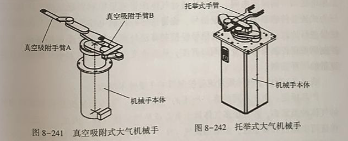
(2)大气机械手(Atmospheric Manipulator): 主要用于常压环境下圆片的传送。大气机械手采用高刚性的轻金属材料手臂、高性能的交流伺服系统和高精度谐波减速器来实现机械手整体传动的高速平稳运行。按传送圆片方式的不机械手手臂可分为接触式和非接触式两种。接触式手臂的特点是在传送过程中,机械手手臂与圆片百接接触,通常采用真空吸附方式或托举方式来搬运网片,如图8-241和图8 -242所示。
由于接触式手臂与圆片表面直接接触,容易造成圆片表面的污染、划伤和翘曲变形等缺陷,因此非接触式手臂开始在要求较高的集成电路设备上得到应用。非接触式圆片传送主要利用空气动力学原理实现机械手对圆片的非接触“ 夹持",典型应用为伯努利式的机械手片叉。非接触式
机械手因其对圆片材料和形状限制少,对圆片表面无划伤,以及对工作环境污染小等优点而得到越来越多的应用。










扫一扫